This is my LaTex Reference page. You can use it as a starting point for learning the markup language, or exploring the content I have written about it.
My Learn LaTex Series:
A series of posts teaching you basics of LaTex. The series is aimed at technologically clueful individuals who have dabbled in things like HTML, and web design but never worked with LaTex
Useful Articles
Here are some useful articles I have written about LaTex in the past.
- Installing LaTex on Windows
- Converting images for your figures:
- Fixing wrong figure numbers
You can browse all my latex articles here:
LaTex Templates:
- Article Template – I use this one for most of my work. It is a basic article style which should look nice both on the screen and when printed. Note, the default margins are big, but I like it this way.
- Exam Template – a very basic exam template with both multiple choice, and short-answer sections. There are probably more fancy ways to do this, but this is easy.
- Presentation Template – this template produces a nice PDF presentation slides. Please note that you may need to compile it twice. PDFLatex may not work – first generate a dvi, and then convert (latex slides.tex, dvi2ps slides.dvi ps2pdf slides.ps).
- Thesis Template – a thesis template conforming to Montclair State University Standards. Your university may have different standards regarding margins, spacing and etc.
Polish Letters:
- Ł is done with \L{} and \l{}
- Ą and Ę and any other letters with a “tail” (ogonek) are done with the \k{} command (k stands for ogonek). So you will have \k{A}, \k{a}, \k{E} and etc..
- Dotted letters like Ż need to be slashdotted (seriously) like this: \.z
- Dashed letters like Ś, Ń or Ó need to be slash-quoted: \’s, \’o and etc..
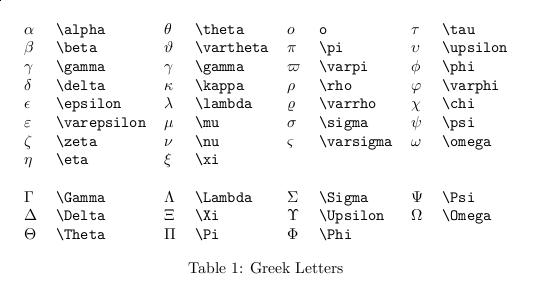
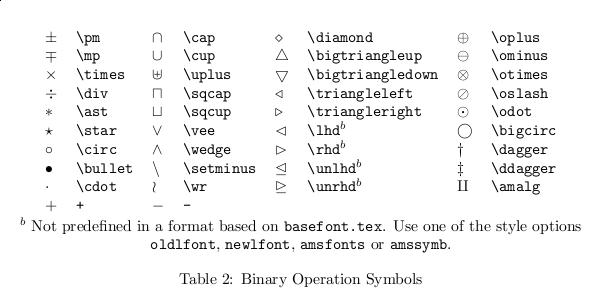
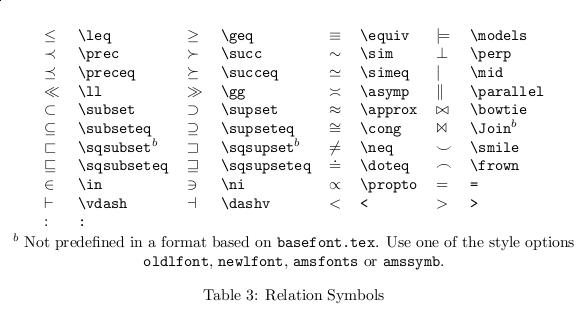
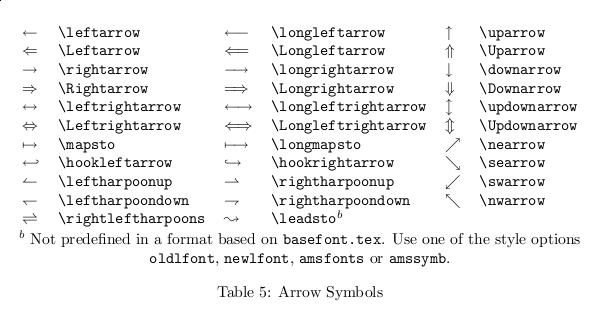
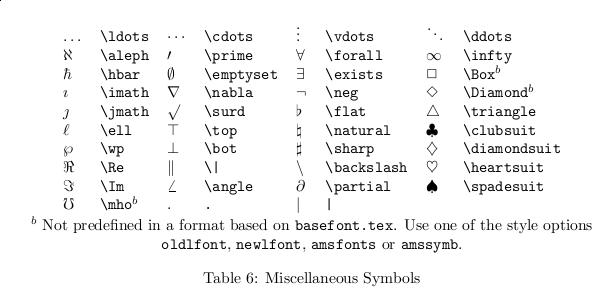
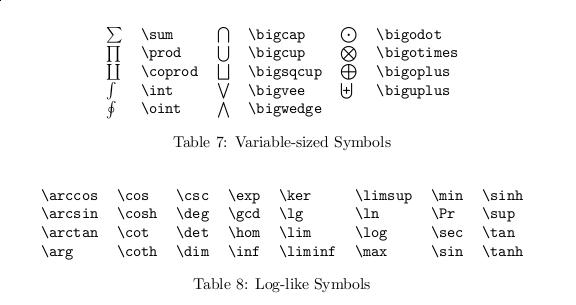
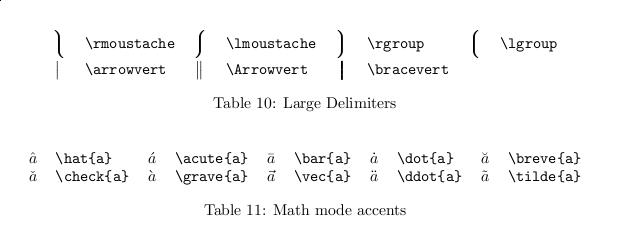
Symbols – Mathematical and Other:
Here are some commonly used symbols and their LaTex codes.


Need a very specific symbol? Try this service that aims to recognize a hand drawn symbol and match it to a LaTex code:
It is not perfect, but works well enough.
Which package is required for the ogonek?
\usepackage{ogonek}
http://www.ctan.org/tex-archive/macros/latex/contrib/ogonek/
in stead of using the ogonek package, you migh consider to use another font encoding (that is more general)
\usepackage[T1]{fontenc}%needed in order to use Polish Characters !!!
\usepackage{ae,aecompl}%to make it all look better using T1